|
Model manipulatora na platformie mobilnej
|
|
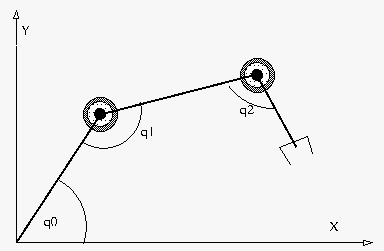
Jest to model manipulatora typu podwójne wahadło zamontowanego na platformie mobilnej.
|
|
|
|
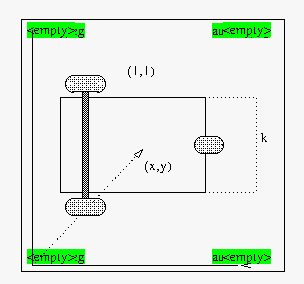
Model platformy (1,1)
|
|
W tym artykule znajdziesz matematyczne wstęp potrzebny do budowania modeli robotów mobilnych. Opisane w nim sa podstawowe aparaty matematyczne, służšce do obliczenia zarówno kinematyki jak i dynamiki platformy mobilnej.
|
|
|
|
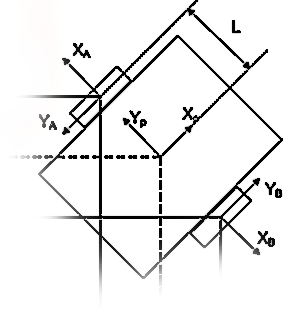
Model platformy klasy (2,0)
|
|
Jest to wyprowadzona dynamika oraz kinematyka dla dowolnej platformy klasy (2,0).
|
|
|

|
Model kurna czołgu
|
|
Jest to wyprowadzona dynamika oraz kinematyka dla dowolnego czolgu.
|
|
|
|
Teoria - Kinematyka
|
|
W tym artykule znajdziesz matematyczne wstęp potrzebny do budowania modeli robotów mobilnych. Opisane w nim sa podstawowe aparaty matematyczne, służšce do obliczenia zarówno kinematyki jak i dynamiki platformy mobilnej.
|
|
|
|
|
Teoria - Dynamika
|
|
|
|
|
|
|
» Wstęp teoretyczny
(Sławek)
» Spotkanie nr 2
(Sławek)
» Spotkanie nr 3
(Sławek)
» Spotkanie nr 4
(Sławek)
|
|
Autorzy : Mirella Frontkiewcz, Weronika Matlakiewcz,
Sławomir Paszko, Zuzanna Pietrowska, Monika Puchalska, Łukasz Żygadło
|